 Vektoriālais reizinājums labējā bāzē.
Vektoriālais reizinājums labējā bāzē.
Matemātikā vektoriālais reizinājums ir bināra operācija, kas diviem trīsdimensiju Eiklīda telpā esošiem vektoriem piekārto vektoru, kas perpendikulārs dotajiem vektoriem un kura garums vienāds ar sākotnējo vektoru veidotā paralelograma laukumu.
Vektoriālo reizinājumu no diviem vektoriem ir iespējams definēt tikai trīs un septiņās dimensijās.[1]
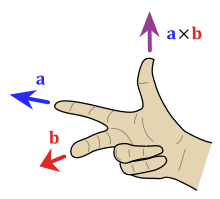 Lai noteiktu iegūtā vektora virzienu, izmanto labās rokas likumu.
Lai noteiktu iegūtā vektora virzienu, izmanto labās rokas likumu.
Par trīsdimensiju Eiklīda telpā esošu vektoru  un
un  vektoriālo reizinājumu sauc tādu vektoru
vektoriālo reizinājumu sauc tādu vektoru  , ka
, ka
 un
un  ,
, , kur θ ir leņķis starp vektoriem un ,
, kur θ ir leņķis starp vektoriem un ,- vektors ir orientēts tā, ka trijnieks
 veido labēju bāzi.
veido labēju bāzi.
Vektoriālā reizinājuma darbību apzīmē ar "×", piemēram,  .
.
Ja  un
un  , tad
, tad

Vektoriālo reizinājumu var aprēķināt ar formāla determinanta palīdzību:

kur  ir vienības vektori, kas vērsti koordinātu asu virzienos.
ir vienības vektori, kas vērsti koordinātu asu virzienos.
Determinanta aprēķināšanu 3×3 matricai atvieglo Sarrusa metode.
Ja , tad

Vektoriālā reizinājuma i-to komponenti var aprēķināt šādi:

kur  ir Levi-Čivita simbols. Ja katru no komponentēm sareizina ar attiecīgo bāzes vektoru un saskaita kopā, tad iegūst
ir Levi-Čivita simbols. Ja katru no komponentēm sareizina ar attiecīgo bāzes vektoru un saskaita kopā, tad iegūst

Vektoriālais reizinājums ir antikomutatīvs:

No tā izriet, ka

Divkāršā vektoriālā reizinājuma formula (viegli atcerēties kā "BAC mīnus CAB"):

Vektoriālais reizinājums nav asociatīvs, taču tas apmierina Jakobi sakarību




